- 首頁
-
產(chǎn)品
-
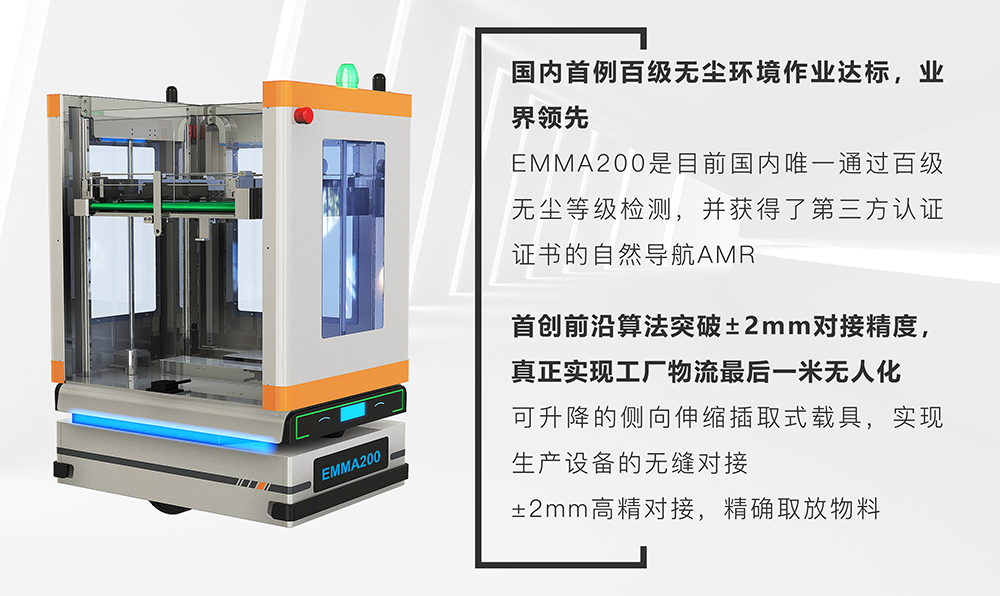
EMMA標準系列
EMMA EMMA 400K EMMA 600K EMMA 1000K EMMA 1500K EMMA 400L EMMA 600L EMMA 1000L EMMA 1500L EMMA 2000L
- OMNI全向系列
-
FOLA智能叉車
FOLA FOLA BN0601 FOLA BN2001 FOLA BN2001D FOLA BN3001 FOLA DN2030 FOLA DN1416 FOLA QN1416 FOLA QN2030 FOLA PN1530
- MORA復合系列
- LUNA室外重載
-
行業(yè)專機
行業(yè)專機 FPD面板行業(yè)專機 PV光伏行業(yè)專機 SMT/PCBA行業(yè)專機 LDT鋰電行業(yè)專機
- 智能倉儲系統(tǒng)
- 智能物流軟件系統(tǒng)
-
EMMA標準系列
- 方案
- 案例
- 研究
- 服務
- 公司
-
Search
 <\/p>
<\/p>











 浙公網(wǎng)安備 33010802011917號
浙公網(wǎng)安備 33010802011917號